Fine-tuning animation
Tweaking lightning and enhancing shader
work work...
Monday, November 26, 2012
Wednesday, November 21, 2012
VIZA685 Lighting & Rendering
Detailing animation
Starting lighting and rendering

Starting lighting and rendering
[click to enlarge]
Animation/ first render ...
Tuesday, November 13, 2012
VIZA685 Animation
Continue animation...
walk in...look around...
dashing forward...jump up...
roll into ball...
fall down and bouncing...
roll back into armadillo in mid air...
flying off screen.
walk in...look around...
dashing forward...jump up...
roll into ball...
fall down and bouncing...
roll back into armadillo in mid air...
flying off screen.
Wednesday, November 7, 2012
VIZA685 Animation
Roll Animation 1st attempt
Path Animation 1st attempt


[click to enlarge]
Modeling background
Wednesday, October 31, 2012
VIZA685 Motion system & Skinning update
[click to enlarge]
Added more local controls for detailing<
Added node for attaching to motion path
Clean-up rigs and hierarchy
Reference for walk cycle
Study and Tracking gait pattern
Ready to animate! yay~
Wednesday, October 24, 2012
VIZA685 Skinning (continue)
Skinning in progress

[click to enlarge]
May utilize copy skin weight function in Maya through unwrapped UV
Added more features for wing and facial controller
Rig is complete and scale-able :)
Wednesday, October 17, 2012

Tuesday, October 9, 2012
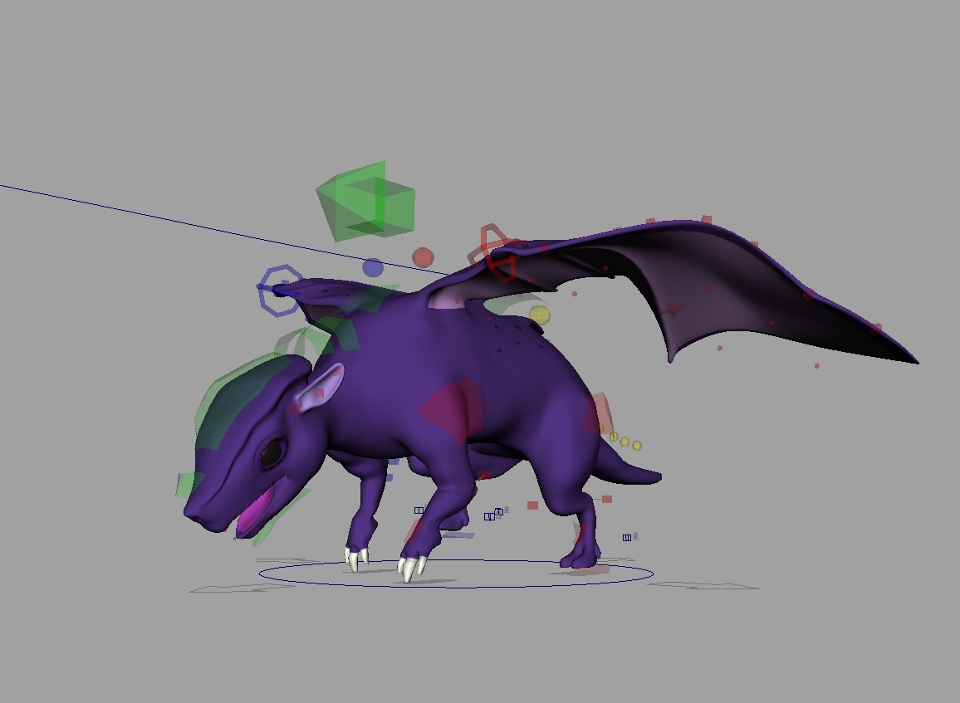
VIZA685 Rig Controls

[click to enlarge]
Rig's features:IKFK switching for both front and hind legs
Reverse foot
Spine twisting attribute
FK & Dynamic Tails
Dynamic Wing membrane
Joint based facial
Tuesday, October 2, 2012
VIZA685 Rig's Control

[click to enlarge]
Test pose 1

[click to enlarge]
Test pose 2

[click to enlarge]
Rig update

[click to enlarge]
Rig in process ...
Wednesday, September 26, 2012


Wednesday, September 19, 2012
VIZA685 Adjustment (models & joints)
Skin test

Models update, added more details and necessary span for deformation.

Transformation into ball

Bat wing folded reference
Tuesday, September 11, 2012
VIZA685 Basic Rig Test video
Basic Rig Test 1st attempt.
Few amendments needed in modeling and joint placement as below:

[click to enlarge]

[click to enlarge]

[click to enlarge]

[click to enlarge]
Monday, September 10, 2012
VIZA685 Basic rig test

[click to enlarge]
The skeleton was procedurally construct in Python.
Will need to paint weight to better judge the deformation, more to come ...
Wednesday, September 5, 2012

Tuesday, September 4, 2012
VIZA685 Modeling
Modeling stage

[click to enlarge]
Wings still need to confirm if the surface is big enough to cover the body when rolling into ball form.

[Early stage]
Thursday, August 30, 2012
VIZA685 Reference Video
Armadillo documentary
Armadillo: Full shot & Close up
Armadillo: A little dinosaur?
Armadillo more detail
Armadillo more detail
Armadillo running & roll into ball
Wednesday, August 29, 2012
VIZA685 Directed Studies
My Directed Studies will be 'Fantasy Creature Rigging Project'.
The project's brief info:
Objective: To build a rigging for quadruped creature, based on armadillo with wings.
Challenges:
1. To build a wing creature with proper deformation.
2. To have a transformation system for the creature to roll into a ball-like form.
(Based on southern three-banded armadillo)
3. To have the wing folding/spreading mechanism integrating well into the ball
transformation.



more to come ...
The project's brief info:
Objective: To build a rigging for quadruped creature, based on armadillo with wings.
Challenges:
1. To build a wing creature with proper deformation.
2. To have a transformation system for the creature to roll into a ball-like form.
(Based on southern three-banded armadillo)
3. To have the wing folding/spreading mechanism integrating well into the ball
transformation.



more to come ...
Thursday, May 10, 2012
Monday, April 2, 2012


Saturday, February 18, 2012











Sunday, February 12, 2012
Rabbit Locomotion Study
European rabbit (Oryctolagus cuniculus)
>>Saltatorial locomotion/ digitigrade locomotion
refers to a form of locomotion in which the animal hops as it moves along. This is found in jackrabbits, the western jumping mouse, and even mule deer appear to utilize a form of saltatorial locomotion where all four feet are off the ground at the same time and they run in a springy fashion.
The locomotor pattern of saltation (hopping) is confined mainly to kangaroos, anurans (tailless amphibians), rabbits, and some groups of rodents in the vertebrates and to a number of insect families in the arthropods. All saltatory animals have hind legs that are approximately twice as long as the anteriormost legs. Although all segments of the hind leg are elongated, two of them—the tibial (between upper segment and ankle) and tarsal (ankle) segments—are the most elongated.
There are at least four different saltatory patterns, but all are similar in that the simultaneous retraction or extension of the hind legs is followed by an aerial phase of movement. The aerial phase in all patterns is governed by the physical principles of ballistics (the flight characteristics of an object): the height and the length of the jumps are functions of the takeoff velocity and angle. The longest jumps are attained when the takeoff angle is 45°.
Before jumping, the femur (upper segment of the hind leg) of the flea is held perpendicular to the ground, the tibia extends obliquely posterior, and the remainder of the hind leg extends posteriorly along the ground. Just prior to the jump, the middle legs flex and tilt the body upward; then the femur of the hind legs swings sharply backward simultaneously with the extension of the tibia. This retraction forces the animal upward and forward at an angle of 50°. As the flea approaches touchdown, the front legs are swung forward and downward, the middle legs are held perpendicular to the body axis, and the hind legs project obliquely posterior. The anterior two pairs of legs thus act to absorb the landing shock.
The positions and movements of the hind legs in rabbits and kangaroos are similar to those of the frog. The major difference is that rabbits, kangaroos, and all other mammals move their legs in a vertical plane instead of a horizontal plane, as do the frogs; because the femur and tibia move vertically, the tarsus need not be elevated to prevent the hind leg from hitting the ground.
The saltatorial gait of rabbits is quadrupedal, whereas that of kangaroos is bipedal. A jumping rabbit stretches forward and lands on its forefeet; generally, both forefeet do not touch ground simultaneously, however. As the forefeet touch, the back flexes, and the hind end rotates forward and downward. The hind feet touch down lateral to the forefeet, and, as the back extends, a new jump begins. In contrast, the kangaroo lands on its hind feet, and the back is held fairly straight through all phases of the jump, although the body inclines forward at takeoff and posteriorly when landing.

The saltatorial gait of rabbits is quadrupedal, whereas that of kangaroos is bipedal. A jumping rabbit stretches forward and lands on its forefeet; generally, both forefeet do not touch ground simultaneously, however. As the forefeet touch, the back flexes, and the hind end rotates forward and downward. The hind feet touch down lateral to the forefeet, and, as the back extends, a new jump begins. In contrast, the kangaroo lands on its hind feet, and the back is held fairly straight through all phases of the jump, although the body inclines forward at takeoff and posteriorly when landing.
“That’s why we don’t have front wheel drives”
Reference books/ papers:
Mammalogy: Adaptation, Diversity, Ecology
The Johns Hopkins University Press September 7, 2007
Principles of Animal Locomotion
Princeton University Press (November 25, 2002)
Animals in Motion
Dover Publications; 1ST edition (June 1, 1957)
Mammalogy: Adaptation, Diversity, Ecology
The Johns Hopkins University Press September 7, 2007
Principles of Animal Locomotion
Princeton University Press (November 25, 2002)
Animals in Motion
Dover Publications; 1ST edition (June 1, 1957)
Muscle and sarcomere lengths in the hind limb of the rabbit (Oryctolagus cuniculus) during a galloping stride (pages 373–383) Nicola J. Dimery(1985)
Tuesday, February 7, 2012
Leaping Lizard inspire robot design
I found this article a while ago when I was looking for reference for the animal study.
It is amazing to learn that a tail can has such an impact in an animal locomotion.
And more important, found this video continue to track back to the 1993's Jurassic Park, where they finally realized the film actually captured the correct tail movement before the theropod dinosaurs jumped.
Full Article here.
UC Berkeley Leaping Lizard
It is amazing to learn that a tail can has such an impact in an animal locomotion.
And more important, found this video continue to track back to the 1993's Jurassic Park, where they finally realized the film actually captured the correct tail movement before the theropod dinosaurs jumped.
Full Article here.
Wednesday, January 25, 2012
V615 Project 1 Animal Study
VIZA 615 Computer Animation: Procedural Motion
Some rough sketches on different animals for brain storming session.


After that, I picked 3 animals that may proceed with further study and research.
1. Basilisk Lizard (Jesus Christ Lizard)
Interesting feature: walk on water
2. Three banded Armadillo
Interesting feature: the only armadillo can roll into a complete ball
3. Giant Panda
Interesting feature: Transition between four-leg walk to sitting
4. Lion
Interesting feature: I just like the idea I can transfer the study outcome to Voltron lion robot :p
So, from there I chose Armadillo and Panda and look for more motion references:
Study the movement by tracking the foot fall:
Some rough sketches on different animals for brain storming session.


After that, I picked 3 animals that may proceed with further study and research.
1. Basilisk Lizard (Jesus Christ Lizard)
Interesting feature: walk on water
2. Three banded Armadillo
Interesting feature: the only armadillo can roll into a complete ball
3. Giant Panda
Interesting feature: Transition between four-leg walk to sitting
4. Lion
Interesting feature: I just like the idea I can transfer the study outcome to Voltron lion robot :p
So, from there I chose Armadillo and Panda and look for more motion references:
Study the movement by tracking the foot fall:
So, I really like to go with Armadillo because of it's roll-into-ball feature and it's tip-toe'ing walk pattern.
However after consulted with Professor McLaughlin, he highlighted that the hard shell of Armadillo will block the deformation of the body. I agree with that so I will need to think of another animal.
Then, I recalled from an online source saying that "the name “armadillo”, or “little armored thing”, does originate from the Spanish conquistadores. The Aztec name was Azotochtli, which means “turtle-rabbit.”"
[from https://www.msu.edu/~nixonjos/armadillo/history.html]
So...
 TURTLE + RABBIT = ARMADILLO
TURTLE + RABBIT = ARMADILLO
Therefore I just picked RABBIT ( in remembrance of the armadillo) :p
Reference images:


Motion study:
MAREY films (XVIIIa) animals rabbits
The Life of The Rabbit
Motion Study:
Foot fall plotted in XLS
However after consulted with Professor McLaughlin, he highlighted that the hard shell of Armadillo will block the deformation of the body. I agree with that so I will need to think of another animal.
Then, I recalled from an online source saying that "the name “armadillo”, or “little armored thing”, does originate from the Spanish conquistadores. The Aztec name was Azotochtli, which means “turtle-rabbit.”"
[from https://www.msu.edu/~nixonjos/armadillo/history.html]
So...

Therefore I just picked RABBIT ( in remembrance of the armadillo) :p
Reference images:


Motion study:
MAREY films (XVIIIa) animals rabbits
Motion Study:
Foot fall plotted in XLS
Subscribe to:
Posts (Atom)